A question we’re often asked is if programs generated offline by Verbotics Weld need to be touched up.
The answer is we try and eliminate or minimise the need for any touch-ups, but there are situations where touch-ups are neccesary. Many of our customers are able to run programs from Weld with no or minimal touch-ups, but this isn’t always the case.
What is a touch-up?
But first, what is a touch-up? When using offline robot programming, the simulated model will never exactly match the real world. Industrial robots are typically only accurate to a few millimetres, and there’s also workcell setup and part variations to consider. Touching up a program is the process of editing a robot program and “touching up” individual points or weld paths so they are in the exact right position. The need for this touch-up process is a major challenge for offline programming, and it can be very time consuming, particularly for large projects. This is one of the major benefits of online programming - as you’re using the real system to program your robot, there’s no need for touch ups as you can leverage the incredible repeatability of industrial robots so the program will run in exactly the same spot each time.

How does our software remove the need for touch-ups?
The good news is that Verbotics Weld includes automatic path finding to minimise, or completely eliminate, the need for touch ups. We know it’s critical to minimise programming time and effort, and this includes the time taken to touch up programs to make them production ready. We use the standard touch, force or laser sensing capability of your robot - letting your robot do the touching up for you. This also means Verbotics programs can deal with part variation, as well as account for things like distortion during welding.
How does our software do this? We analyse the path of each weld, and figure out locations where we should sense - for example, a curved or long weld will require more sensing locations. We then analyse the nearby geometry to figure out surfaces that we can sense. Additionally, as part of the commissioning process we ask you to take measurements of key points of your workcell using the robot. We aim to make the workcell kinematic model accurate to ± 5mm, and then use path finding to dial the weld position in exactly when the program is run.
In the video below, you can see the same weld without and with path finding. As you can see, once path finding is performed, the weld ends up in the exact right spot.
When might touch-ups still be required?
While Verbotics Weld can use path finding to eliminate the need for touch-ups for in many cases, there are situations where Verbotics programs do need to be touched up. The main reasons are:
- Part Geometry - if your part has a number of small intricate parts or doesn’t have any flat and perpendicular surfaces, the geometry may not be able to be sensed.
- TCP Accuracy - path finding relies on your TCP to be calibrated accurately.
- CAD Model - if the overall structure of the CAD model doesn’t match the real world (for example if preps aren’t modelled), you may need to to touch up weld paths to be in the correct location.
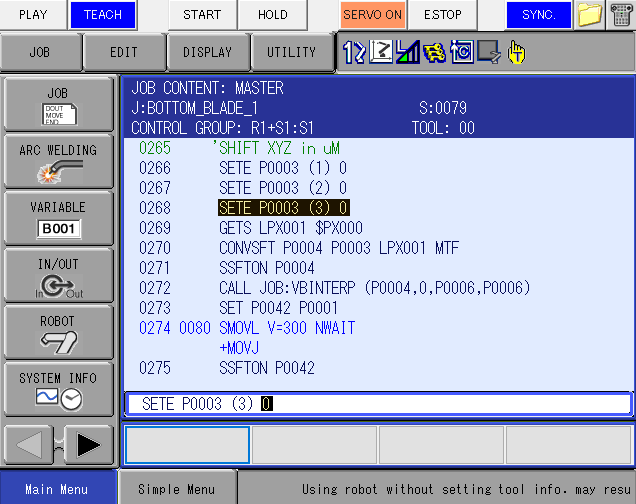
The good news if you do need to touch up your program is that we’ve designed our generated code to be easy to touch up. The output of our software is plain robot code, and each weld has a “manual offset” which can be adjusted to move the weld position. This is shown in the teach pendant screenshot from a Yaskawa robot below - we include 3 numbers you can edit to adjust the welding position in the X, Y and Z directions.
Hopefully this post gives you some information to understand how Verbotics can eliminate or reduce the need for touch-ups, and understand some of the scenarios where it may be neccesary. If you have questions or would like to discuss this in more details with us for your specific needs, please contact us.